The first agricultural robot developed by biogriculture is ideally suited for use in vegetable and bush fruit cultivation.
Instead of costly training of the MRV-10 for a selection via specific features of the crops, the presented method allows without specific information about the respective crops to distinguish them reliably from weeds. In our first prototype, crop zone detection is performed using induction detectors developed for the metal working industry. These are certified for use in wet areas and have been field-tested many times. An integrated GPS is used to define the working area, coordinate the swarm and autonomously track the movement along the plant rows.
The MRV-10 first detects all plants with the help of an optical RADAR (LIDAR) and selects the weeds with the help of the induction detectors in order to press the min to the ground with the plunger attached to the arm and cut them off. The weeds are left behind for mulching. The undercarriage from Pololu, the American supplier of robotics, weighs just 3 kg. Its narrow width and length make it ideal for navigating between rows of plants.
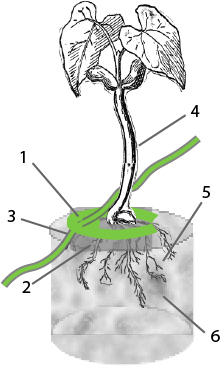
The marking of the crop zones is done in each case by means of a simple metallic induction carrier (1 - in the figure an open, elastic wire loop with eyelet), which encloses the crop at ground level. The induction carrier is anchored by means of a keel-shaped vertical fastening support (2). In the case of seedlings (4), the root ball (5) is embedded in a cone (6) of soil obtained when plowing the setting furrow to fix the induction support. In order to recover the markings, they are connected to each other by means of the eyelets through the carrier band (3). In the case of setting machines, the seedlings (4) are inserted with the root ball directly through the open carrier ring (1) and placed by the setting machine in the setting furrow in such a way that the transition from the root ball to the stem of the respective seedling is at the level of the surrounding soil. Afterwards, the seeding furrow is closed again. In the case of direct seeding, the seed is coated with the soil cone (6) instead of the seedling.
The markings are a significant cost factor due to the high number of pieces required per hectare. With average row and plant distances of 30 cm and expected costs of one cent per marker, investment costs of 1500 EUR per hectare result. Through cooperation via a licensing model with manufacturers of seeding and sowing machines, the application and recoveryofthemarkerscanbedirectlyintegratedintotherespectiveprocesses. Alternatively, a separate extension component for existing seeders can be considered. For small field sizes, for bush fruitor in vineyards, the markers can also be applied and recovered manually or semi-automatically.
The first prototype of the MRV-10 agricultural robot developed by biogriculture confirms the practicality of the patent-pending process
Navigation in practice:
Detection of the crop zones by means of induction:
Weed control: