Der erste von biogriculture entwickelte Agrar-Roboter MRV-10 ist für einen Einsatz im Gemüse- und Strauchobstanbau optimal geeignet.
Anstatt den MRV-10 aufwendig für eine Selektion über spezifische Merkmale der Nutzpflanzen zu trainieren, ermöglicht das vorgestellte Verfahren ohne spezifische Informationen über die jeweiligen Nutzpflanzen, diese sicher vom Unkraut zu unterscheiden. Bei unserem ersten Prototypen erfolgt die Erkennung der Nutzpflanzenzonen mit Hilfe von für die metallverarbeitende Industrie entwickelten Induktionsdetektoren. Diese sind zertifiziert für den Einsatz in Nassräumen und vielfach praxiserprobt. Ein integriertes GPS dient zur Definition des Arbeitsbereichs, Koordination des Schwarms und zum autonomen Tracking der Bewegung entlang der Pflanzreihen.
Der MRV-10 erkennt zunächst alle Pflanzen mit Hilfe eines optischen RADAR (LIDAR) und selektiert hiervon das Unkraut mit Hilfe der Induktionsdetektoren, um es dann mit dem am Arm angebrachten Stempel in den Boden zu drücken und abzutrennen. Das Unkraut wird zum Mulchen zurückgelassen. Das Fahrwerk des amerikanischen Zulieferers für Robotik Pololu hat ein Gewicht von nur 3 kg. Die geringe Breite und Länge ist bestens zur Navigation zwischen den Pflanzreihen geeignet.
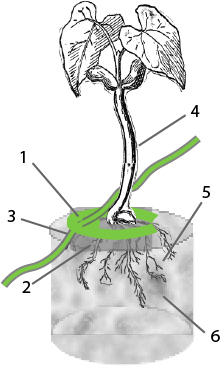
Die Markierung der Nutzpflanzenzonen erfolgt jeweils mit Hilfe eines einfachen metallischen Induktionsträgers (1 - in der Abbildung eine offene, elastische Drahtschleife mit Öse), der in Bodenhöhe die Nutzpflanze umfasst. Der Induktionsträger wird mittels eines kielförmigen senkrechten Befestigungsträgers (2) verankert. Bei Setzlingen (4) wird der Wurzelballen (5) in einen Konus (6) aus Erde, die beim Pflügen der Setzfurche gewonnen wird, zur Fixierung des Induktionsträgers eingebettet. Zur Wiedergewinnung der Markierungen sind diese mit Hilfe der Ösen über das Trägerband (3) miteinander verbunden. Bei Setzmaschinen werden die Setzlinge (4) mit dem Wurzelballen direkt durch den offenen Trägerring (1) gesteckt und von der Setzmaschine in die Setzfurche so gesetzt, dass der Übergang vom Wurzelballen zum Stängel des jeweiligen Setzlings auf Höhe des umliegenden Bodens ist. Anschließend wird die Setzfurche wieder verschlossen. Bei Direktsaat wird anstatt des Setzlings das Saatgut mit dem Erdkonus (6) ummantelt.
Die Markierungen sind aufgrund der hohen erforderlichen Stückzahl pro Hektar ein wesentlicher Kostenfaktor. Bei mittleren Reihen- und Pflanzenabständen von 30 cm und erwarteten Kosten von einem Cent pro Markierung ergeben sich Investitionskosten von 1500 EUR pro Hektar. Durch Kooperationen über ein Lizenzmodell mit Herstellern von Setz- und Sämaschinen kann das Ausbringen und die Rückgewinnung der Markierungen direkt in die jeweiligen Prozesse integriert werden. Alternativ kann auch eine eigene Erweiterungskomponente für vorhandene Setz- und Sämaschinen angedacht werden. Für kleine Feldgrößen, bei Strauchobst oder im Weinanbau lassen sich die Markierungen zudem auch manuell bzw. teilautomatisiert ausbringen und zurückgewinnen.
Der erste Prototyp des von biogriculture entwickelten Agrar-Roboters MRV-10 bestätigt die Praxistauglichkeit des zum Patent angemeldeten Verfahrens
Navigation in der Praxis:
Erkennung der Nutzpflanzenzonen mittels Induktion:
Unkrautbekämpfung: