Bis zu 70% der Kosten im ökologischen Gemüseanbau sind Lohnkosten.
Die Unkrautbekämpfung bildet nach der Ernte und der Vermarktung den zweitgrößten Anteil der Arbeitskosten. Durch das langsame Wachstum der Gemüsepflanzen muss die Unkrautbekämpfung so früh wie möglich und sehr regelmäßig erfolgen, da sonst die Nutzpflanzen schnell überwuchert werden. Generell können Anbaugeräte wie Eggen zwischen den Pflanzreihen das Unkraut entfernen.
Oft sind jedoch Gemüsepflanzen ‒ vor allem im sehr frühen Stadium ‒ zu empfindlich oder aufgrund von gemischten Kulturen nur schwer mit Maschinen zu pflegen. Aus diesen Gründen müssen Gemüsebauern häufig noch immer mit einer klassischen Hacke von Hand Unkraut jäten. Durch den hohen Anteil von Frischgemüse am Gesamtabsatz und die im Wesentlichen regionale Distributionsstruktur sind Monokulturlandschaften wie bei Getreide, Mais, Raps und Soja selten und es herrschen kleine, spezialisierte landwirtschaftliche Betriebe vor. Die gegenüber konventionellen Betrieben deutlich bessere Ertragssituation hat dabei in den letzen Jahren zu einem starken Anstieg im Bereich des ökologischen Gemüseanbaus geführt. Dabei liegt der Fokus auf saisonalem Frischgemüse wie Salat, Frühlingszwiebeln oder Radieschen, das die höchsten Ertragspotenziale bietet. Pro Anbaujahr und Beet sind bis zu vier Ernten verschiedener Gemüsesorten möglich, die in einer ausgeklügelten Fruchtfolge mit bis zu 50 Gemüsesorten angebaut werden. Aus diesem Grund bietet der Gemüseanbau z.B. durch sukzessive Teilumstellungen die ideale Basis für einen Übergang zu einem Ökobetrieb.
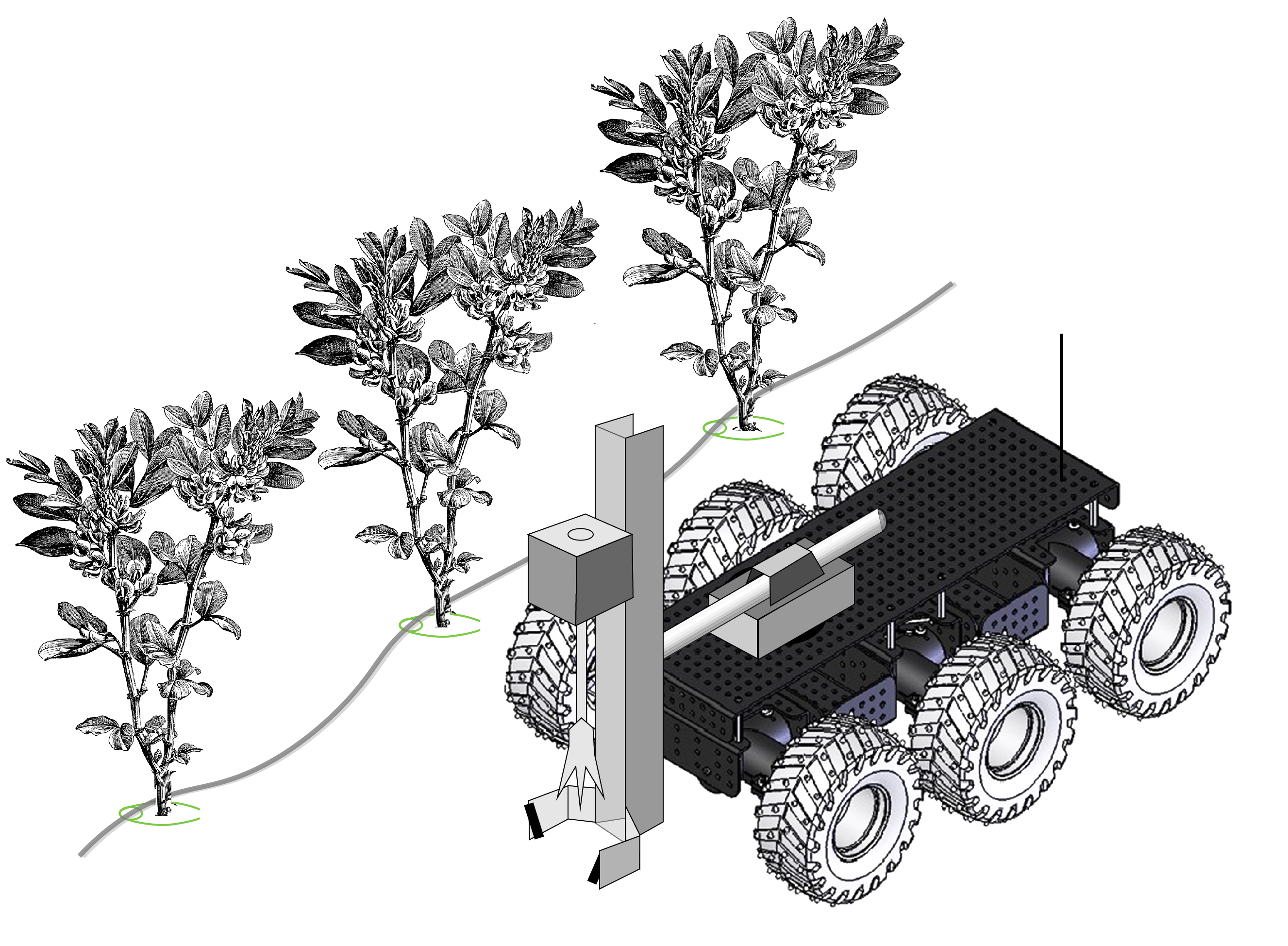
Kern des neuartigen Ansatzes ist die zum Patent angemeldete Markierung der Nutzpflanzenzonen beim Setzen oder Säen. Dies vermeidet aufwändige bildgestützen Verfahren zur Nutzpflanzenerkennung und erlaubt es, selbst in ausgeprägten Mischkulturen und unabhängig von der Nutzpflanzenart, diese sicher zu erkennen. Der von biogriculture konzipierte Klein-

Anstatt den MRV-10 aufwendig für eine Selektion über spezifische Merkmale der Nutzpflanzen zu trainieren, ermöglicht das vorgestellte Verfahren ohne spezifische Informationen über die jeweiligen Nutzpflanzen, diese sicher vom Unkraut zu unterscheiden.
Bei dem ersten funktionsfähigen Prototypen erfolgt die Erkennung der Nutzpflanzenzonen mit Hilfe von für die metallverarbeitende Industrie entwickelten Induktionsdetektoren. Diese sind zertifiziert für den Einsatz in Nassräumen und vielfach praxiserprobt. Ein integriertes GPS dient zur Definition des Arbeitsbereichs, Koordination des Schwarms und zum autonomen Tracking der Bewegung entlang der Pflanzreihen.